R-tree Spatial Queries
A Java implementation of an R*-tree spatial index for efficient querying of OpenStreetMap (OSM) data, supporting range queries, k-nearest neighbor searches, and skyline queries with comprehensive performance analysis.
github.com/pompos02/R-treeQueriesProject Overview
This project implements an R*-tree spatial index in Java for efficient spatial querying of OpenStreetMap data (Malta). The system processes OSM XML files through a three-stage pipeline, builds spatial indexes, and supports multiple query types with comprehensive performance benchmarking against sequential scans.
- Language: Java 8+ with custom spatial data structures
- Data Source: OpenStreetMap (.osm) XML files
- Core Algorithm: R*-tree spatial indexing for 2D point data
- Query Types: Range queries, k-nearest neighbors, skyline queries
- Performance: Comprehensive benchmarking with speedup analysis
Data Pipeline
The application follows a structured three-stage pipeline for processing OSM data into an efficient spatial index:
Stage 1: OSM Parsing
- Input: OpenStreetMap XML file containing spatial data
- Output: List of
Recordobjects with coordinates and metadata
Stage 2: DataFile Creation
- Function: Organizes records into 32KB blocks for efficient storage
- Output:
datafile.dat- Binary file containing serialized spatial records
Stage 3: IndexFile Creation
- Process: R*-tree construction via
RStarTreeorBulkLoadingRStarTree - Function: Builds spatial index structure pointing to datafile blocks
- Output:
indexfile.dat- Binary file containing R*-tree nodes
Architecture Types
1. Standard R*-tree (Incremental Loading)
- Method: Records inserted one-by-one with dynamic tree restructuring
- Characteristics:
- Dynamic insertion with overflow treatment
- Supports insertions after initial construction
2. Bulk Loading R*-tree
- Method: Sorts all records and builds tree bottom-up
- Characteristics:
- More efficient initial construction
- Better space utilization
Query Types
Range Query (BoundingBoxRangeQuery)
Finds all points within a rectangular bounding box. Efficient for spatial range selections.
K-Nearest Neighbors (NearestNeighboursQuery)
Finds the k closest points to a given coordinate. Optimized for proximity-based searches.
Skyline Query (SkylineQuery)
Identifies non-dominated points within a bounding box region. Useful for multi-criteria optimization.
Performance Analysis
Comprehensive benchmarking comparing R*-tree performance against sequential scan for range and KNN queries with variable parameters.
Range Query Performance
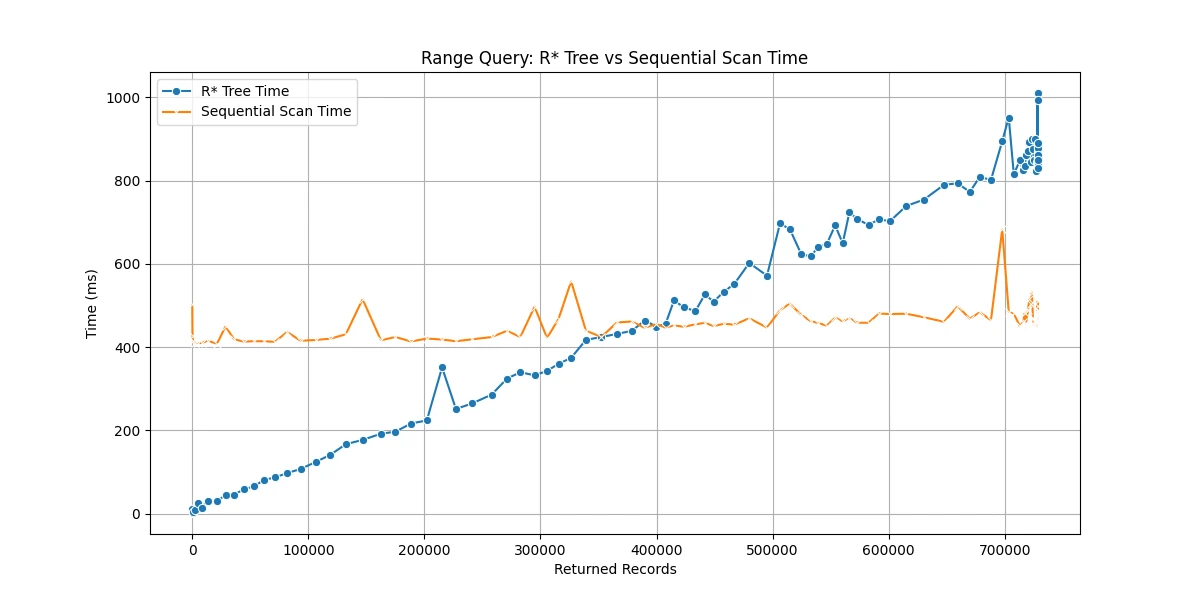
Range query performance comparison between R*-tree and sequential scan
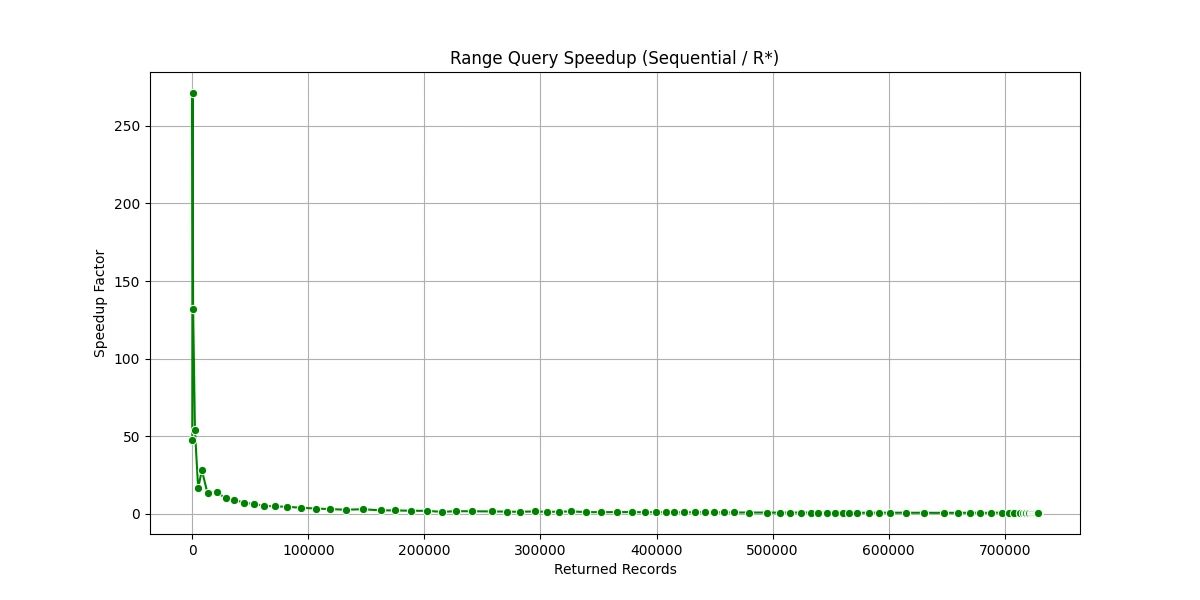
Speedup analysis for range queries showing when R*-tree outperforms sequential scan
K-Nearest Neighbors Performance
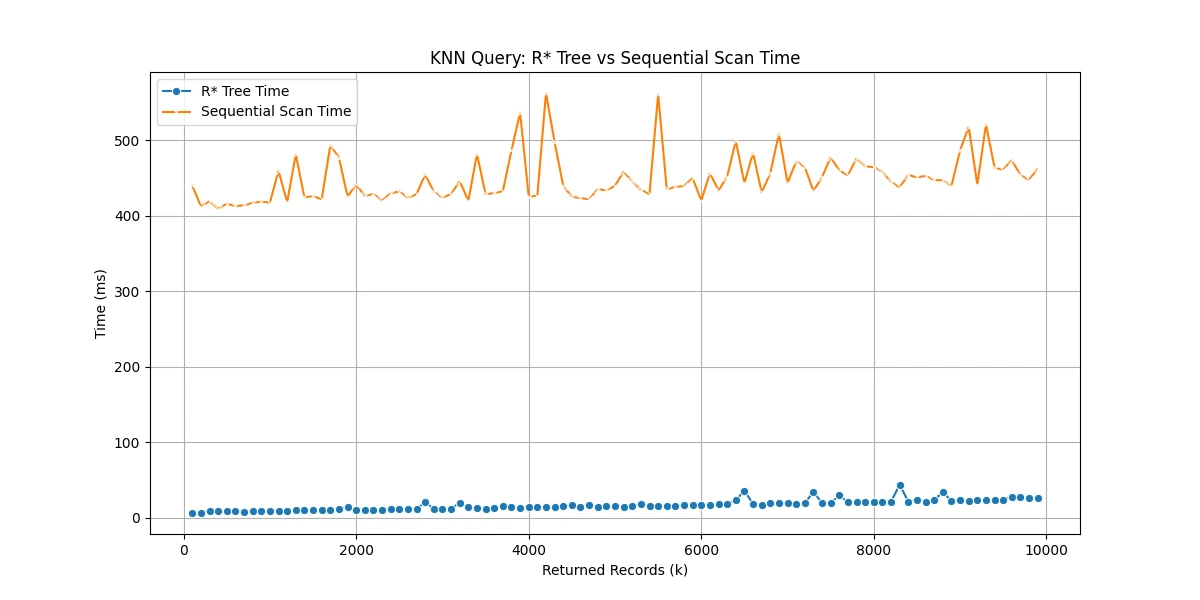
KNN query performance comparison showing R*-tree efficiency
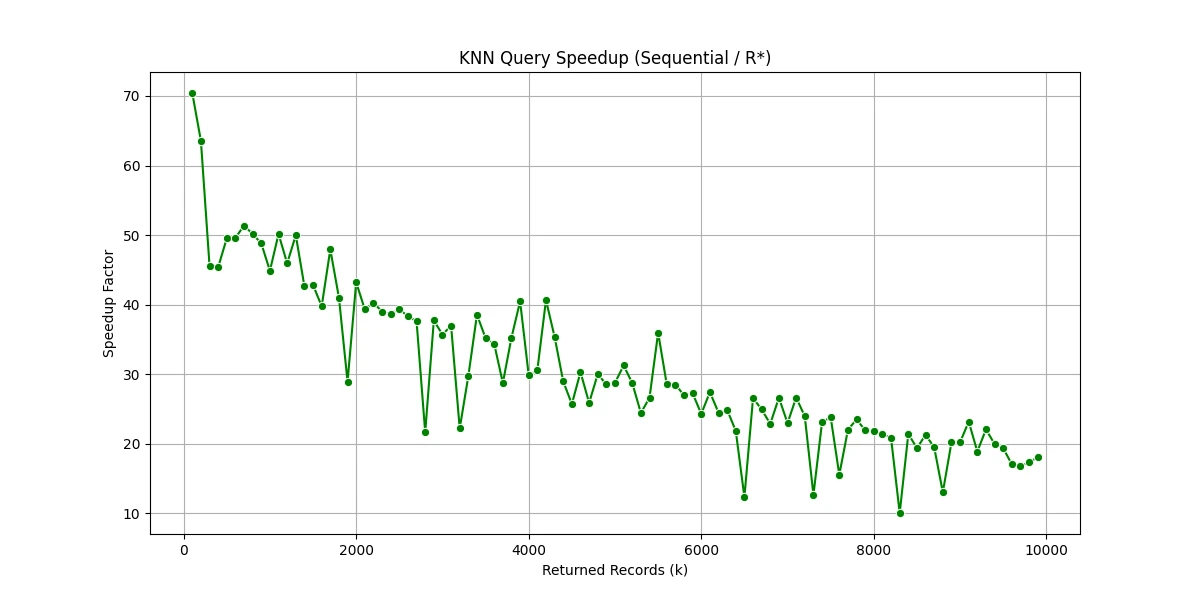
Speedup analysis for KNN queries demonstrating spatial indexing benefits
Key Observations:
- Range Queries: R*-tree faster for small ranges (few records), sequential scan better for large ranges (many records)
- KNN Queries: R*-tree consistently outperforms sequential scan with speedup increasing as k grows (up to 26.71x faster)
- Selective Queries: Spatial indexing excels in selective queries where only a subset of data needs to be examined